アラン分散(Allan variance)は、時計、発振器、アンプにおける周波数安定度を表す指標である。名前はDavid W. Allanに由来し、数学的には と表される。
アラン偏差(Allan deviation)は、アラン分散の平方根である である。
アラン分散は統計的な安定度を推定するためのものであり、周波数ドリフトなどの系統的な誤差を推定するものではない。また、アラン分散には、修正アラン分散をはじめとするいくつかの派生形がある。
背景
水晶発振器や原子時計の安定性が調べられていた頃、位相ノイズにはホワイトノイズのみならず、フリッカー周波数ノイズも存在しているとわかった。これらのノイズの形は、推定値が収束しないため、標準偏差などの伝統的な統計ツールでは扱いが難しい。安定性を分析する初期の取り組みは、理論的な分析と実用的な測定の両方から行われた。
この問題を解決するため、David AllanはM-サンプル分散を導入し、間接的にアラン分散(2-サンプル分散)を導入した。アラン分散では、全ての種類のノイズを見分けることはできないが、有意義な情報が得られる。IEEEはのちに、M-サンプル分散よりもアラン分散(2-サンプル分散)の方が望ましいとみなした。
定義
振動と位相ノイズ
振動は以下の式で表される。
位相は以下のように表される。
は基準となる周波数を表し、は位相ノイズを表す。
周波数
瞬間的な周波数は、位相の時間微分で表される。
規格化された周波数偏差
瞬間的な周波数の、基準となる周波数からの偏差を規格化して、以下の量を定義する。
規格化された周波数偏差の時間平均
規格化された周波数偏差の時間平均は以下のように定義される。
ここでτは平均化時間を表す。
アラン分散
n番目の周波数偏差を以下のように表すとする。
アラン分散は以下のように定義される。
ただし、は期待値を表す。
アラン偏差
標準偏差と分散の関係と同様に、アラン偏差はアラン分散の平方根として定義される。
べき乗ノイズ
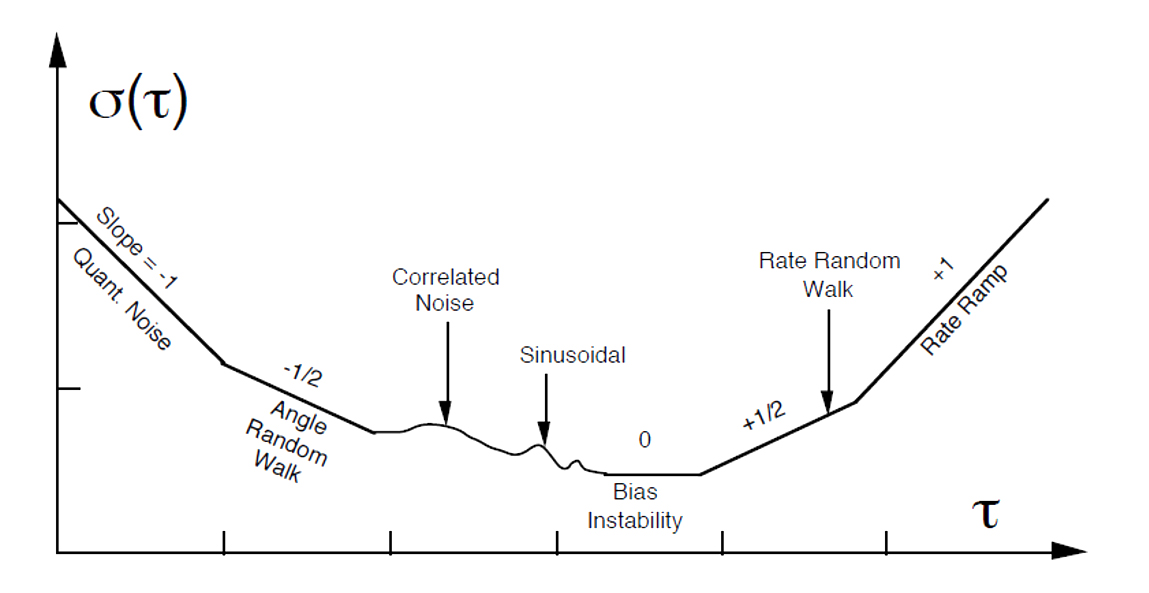
アラン分散は、さまざまなべき乗ノイズを見分けることができる。
アラン分散は、白色位相ノイズとフリッカー位相ノイズを見分けることができない。一方で、修正アラン分散ではこれらを見分けることができる。
線形応答
アラン分散は、位相や周波数に乗るノイズを見分けるためのものである。一方で、位相や周波数の線形な変化に対して依存性を示すことがある。
上の表より、アラン分散は、位相や周波数に定数のオフセットがついても変化しないが、周波数が線形に変化すると影響を受ける。
関連項目
出典